











SCADA
SCADA stands for supervisory control and data acquisition. It generally refers to industrial control systems: computer systems that monitor and control industrial, infrastructure, or facility-based processes, as described below:
- Industrial processes include those of manufacturing, production, power generation, fabrication, and refining, and may run in continuous, batch, repetitive, or discrete modes.
- Infrastructure processes may be public or private, and include water treatment and distribution, wastewater collection and treatment, oil and gas pipelines, electrical power transmission and distribution, Wind farms, civil defense siren systems, and large communication systems.
- Facility processes occur both in public facilities and private ones, including buildings, airports, ships, and space stations. They monitor and control HVAC, access, and energy consumption.
Common system components
A SCADA System usually consists of the following subsystems:
- A Human-Machine Interface or HMI is the apparatus which presents process data to a human operator, and through this, the human operator monitors and controls the process.
- A supervisory (computer) system, gathering (acquiring) data on the process and sending commands (control) to the process.
- Remote Terminal Units (RTUs) connecting to sensors in the process, converting sensor signals to digital data and sending digital data to the supervisory system.
- Programmable Logic Controller (PLCs) used as field devices because they are more economical, versatile, flexible, and configurable than special-purpose RTUs.
- Communication infrastructure connecting the supervisory system to the Remote Terminal Units.
Supervision vs. control
There is, in several industries, considerable confusion over the differences between SCADA systems and distributed control systems (DCS). Generally speaking, a SCADA system always refers to a system that coordinates, but does not control processes in real time. The discussion on real-time control is muddied somewhat by newer telecommunications technology, enabling reliable, low latency, high speed communications over wide areas. Most differences between SCADA and DCS are culturally determined and can usually be ignored. As communication infrastructures with higher capacity become available, the difference between SCADA and DCS will fade.
Summary: 1. DCS is process oriented, while SCADA is data acquisition oriented. 2. DCS is process state driven, while SCADA is event driven. 3. DCS is commonly used to handle operations on a single locale, while SCADA is preferred for applications that are spread over a wide geographic location. 4. DCS operator stations are always connected to its I/O, while SCADA is expected to operate despite failure of field communications.
Systems concepts
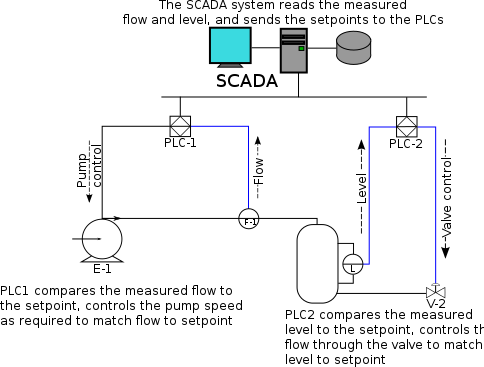
The term SCADA usually refers to centralized systems which monitor and control entire sites, or complexes of systems spread out over large areas (anything between an industrial plant and a country). Most control actions are performed automatically by Remote Terminal Units ("RTUs") or by programmable logic controllers ("PLCs"). Host control functions are usually restricted to basic overriding or supervisory level intervention. For example, a PLC may control the flow of cooling water through part of an industrial process, but the SCADA system may allow operators to change the set points for the flow, and enable alarm conditions, such as loss of flow and high temperature, to be displayed and recorded. The feedback control loop passes through the RTU or PLC, while the SCADA system monitors the overall performance of the loop.
Data acquisition begins at the RTU or PLC level and includes meter readings and equipment status reports that are communicated to SCADA as required. Data is then compiled and formatted in such a way that a control room operator using the HMI can make supervisory decisions to adjust or override normal RTU (PLC) controls. Data may also be fed to a Historian, often built on a commodity Database Management System, to allow trending and other analytical auditing.
SCADA systems typically implement a distributed database, commonly referred to as a tag database, which contains data elements called tags or points. A point represents a single input or output value monitored or controlled by the system. Points can be either "hard" or "soft". A hard point represents an actual input or output within the system, while a soft point results from logic and math operations applied to other points. (Most implementations conceptually remove the distinction by making every property a "soft" point expression, which may, in the simplest case, equal a single hard point.) Points are normally stored as value-timestamp pairs: a value, and the timestamp when it was recorded or calculated. A series of value-timestamp pairs gives the history of that point. It's also common to store additional metadata with tags, such as the path to a field device or PLC register, design time comments, and alarm information.
Human Machine Interface
A Human-Machine Interface or HMI is the apparatus which presents process data to a human operator, and through which the human operator controls the process.
 Typical Basic SCADA Animations
Typical Basic SCADA AnimationsAn HMI is usually linked to the SCADA system's databases and software programs, to provide trending, diagnostic data, and management information such as scheduled maintenance procedures, logistic information, detailed schematics for a particular sensor or machine, and expert-system troubleshooting guides.
The HMI system usually presents the information to the operating personnel graphically, in the form of a mimic diagram. This means that the operator can see a schematic representation of the plant being controlled. For example, a picture of a pump connected to a pipe can show the operator that the pump is running and how much fluid it is pumping through the pipe at the moment. The operator can then switch the pump off. The HMI software will show the flow rate of the fluid in the pipe decrease in real time. Mimic diagrams may consist of line graphics and schematic symbols to represent process elements, or may consist of digital photographs of the process equipment overlain with animated symbols.
The HMI package for the SCADA system typically includes a drawing program that the operators or system maintenance personnel use to change the way these points are represented in the interface. These representations can be as simple as an on-screen traffic light, which represents the state of an actual traffic light in the field, or as complex as a multi-projector display representing the position of all of the elevators in a skyscraper or all of the trains on a railway.
An important part of most SCADA implementations is alarm handling. The system monitors whether certain alarm conditions are satisfied, to determine when an alarm event has occurred. Once an alarm event has been detected, one or more actions are taken (such as the activation of one or more alarm indicators, and perhaps the generation of email or text messages so that management or remote SCADA operators are informed). In many cases, a SCADA operator may have to acknowledge the alarm event; this may deactivate some alarm indicators, whereas other indicators remain active until the alarm conditions are cleared. Alarm conditions can be explicit - for example, an alarm point is a digital status point that has either the value NORMAL or ALARM that is calculated by a formula based on the values in other analogue and digital points - or implicit: the SCADA system might automatically monitor whether the value in an analogue point lies outside high and low limit values associated with that point. Examples of alarm indicators include a siren, a pop-up box on a screen, or a coloured or flashing area on a screen (that might act in a similar way to the "fuel tank empty" light in a car); in each case, the role of the alarm indicator is to draw the operator's attention to the part of the system 'in alarm' so that appropriate action can be taken. In designing SCADA systems, care is needed in coping with a cascade of alarm events occurring in a short time, otherwise the underlying cause (which might not be the earliest event detected) may get lost in the noise. Unfortunately, when used as a noun, the word 'alarm' is used rather loosely in the industry; thus, depending on context it might mean an alarm point, an alarm indicator, or an alarm event.
Hardware solutions
SCADA solutions often have Distributed Control System (DCS) components. Use of "smart" RTUs or PLCs, which are capable of autonomously executing simple logic processes without involving the master computer, is increasing. A functional block programming language, IEC 61131-3 (Ladder Logic), is frequently used to create programs which run on these RTUs and PLCs. Unlike a procedural language such as the C programming language or FORTRAN, IEC 61131-3 has minimal training requirements by virtue of resembling historic physical control arrays. This allows SCADA system engineers to perform both the design and implementation of a program to be executed on an RTU or PLC. A Programmable automation controller (PAC) is a compact controller that combines the features and capabilities of a PC-based control system with that of a typical PLC. PACs are deployed in SCADA systems to provide RTU and PLC functions. In many electrical substation SCADA applications, "distributed RTUs" use information processors or station computers to communicate with digital protective relays, PACs, and other devices for I/O, and communicate with the SCADA master in lieu of a traditional RTU.
Since about 1998, virtually all major PLC manufacturers have offered integrated HMI/SCADA systems, many of them using open and non-proprietary communications protocols. Numerous specialized third-party HMI/SCADA packages, offering built-in compatibility with most major PLCs, have also entered the market, allowing mechanical engineers, electrical engineers and technicians to configure HMIs themselves, without the need for a custom-made program written by a software developer.
Remote Terminal Unit (RTU)
The RTU connects to physical equipment. Typically, an RTU converts the electrical signals from the equipment to digital values such as the open/closed status from a switch or a valve, or measurements such as pressure, flow, voltage or current. By converting and sending these electrical signals out to equipment the RTU can control equipment, such as opening or closing a switch or a valve, or setting the speed of a pump.
Supervisory Station
The term "Supervisory Station" refers to the servers and software responsible for communicating with the field equipment (RTUs, PLCs, etc), and then to the HMI software running on workstations in the control room, or elsewhere. In smaller SCADA systems, the master station may be composed of a single PC. In larger SCADA systems, the master station may include multiple servers, distributed software applications, and disaster recovery sites. To increase the integrity of the system the multiple servers will often be configured in a dual-redundant or hot-standby formation providing continuous control and monitoring in the event of a server failure.
Operational philosophy
For some installations, the costs that would result from the control system failing are extremely high. Possibly even lives could be lost. Hardware for some SCADA systems is ruggedized to withstand temperature, vibration, and voltage extremes, but in most critical installations reliability is enhanced by having redundant hardware and communications channels, up to the point of having multiple fully equipped control centres. A failing part can be quickly identified and its functionality automatically taken over by backup hardware. A failed part can often be replaced without interrupting the process. The reliability of such systems can be calculated statistically and is stated as the mean time to failure, which is a variant of mean time between failures. The calculated mean time to failure of such high reliability systems can be on the order of centuries.
Communication infrastructure and methods
SCADA systems have traditionally used combinations of radio and direct serial or modem connections to meet communication requirements, although Ethernet and IP over SONET / SDH is also frequently used at large sites such as railways and power stations. The remote management or monitoring function of a SCADA system is often referred to as telemetry.
This has also come under threat with some customers wanting SCADA data to travel over their pre-established corporate networks or to share the network with other applications. The legacy of the early low-bandwidth protocols remains, though. SCADA protocols are designed to be very compact and many are designed to send information to the master station only when the master station polls the RTU. Typical legacy SCADA protocols include Modbus RTU, RP-570, Profibus and Conitel. These communication protocols are all SCADA-vendor specific but are widely adopted and used. Standard protocols are IEC 60870-5-101 or 104, IEC 61850 and DNP3. These communication protocols are standardized and recognized by all major SCADA vendors. Many of these protocols now contain extensions to operate over TCP/IP. It is good security engineering practice to avoid connecting SCADA systems to the Internet so the attack surface is reduced.
RTUs and other automatic controller devices were being developed before the advent of industry wide standards for interoperability. The result is that developers and their management created a multitude of control protocols. Among the larger vendors, there was also the incentive to create their own protocol to "lock in" their customer base. A list of automation protocols is being compiled here.
Recently, OLE for Process Control (OPC) has become a widely accepted solution for intercommunicating different hardware and software, allowing communication even between devices originally not intended to be part of an industrial network.
SCADA architectures
SCADA systems have evolved through 3 generations as follows:
First generation: "Monolithic"
In the first generation, computing was done by mainframe computers. Networks did not exist at the time SCADA was developed. Thus SCADA systems were independent systems with no connectivity to other systems. Wide Area Networks were later designed by RTU vendors to communicate with the RTU. The communication protocols used were often proprietary at that time. The first-generation SCADA system was redundant since a back-up mainframe system was connected at the bus level and was used in the event of failure of the primary mainframe system.
Second generation: "Distributed"
The processing was distributed across multiple stations which were connected through a LAN and they shared information in real time. Each station was responsible for a particular task thus making the size and cost of each station less than the one used in First Generation. The network protocols used were still mostly proprietary, which led to significant security problems for any SCADA system that received attention from a hacker. Since the protocols were proprietary, very few people beyond the developers and hackers knew enough to determine how secure a SCADA installation was. Since both parties had invested interests in keeping security issues quiet, the security of a SCADA installation was often badly overestimated, if it was considered at all.
Third generation: "Networked"
These are the current generation SCADA systems which use open system architecture rather than a vendor-controlled proprietary environment. The SCADA system utilizes open standards and protocols, thus distributing functionality across a WAN rather than a LAN. It is easier to connect third party peripheral devices like printers, disk drives, and tape drives due to the use of open architecture. WAN protocols such as Internet Protocol (IP) are used for communication between the master station and communications equipment. Due to the usage of standard protocols and the fact that many networked SCADA systems are accessible from the Internet, the systems are potentially vulnerable to remote cyber-attacks. On the other hand, the usage of standard protocols and security techniques means that standard security improvements are applicable to the SCADA systems, assuming they receive timely maintenance and updates.
==Trends in SCADA=Reliability Corporation]] (NERC) has specified that electrical system data should be time-tagged to the nearest millisecond. Electrical system SCADA systems provide this Sequence of events recorder function, using Radio clocks to synchronize the RTU or distributed RTU clocks.
SCADA systems are coming in line with standard networking technologies. Ethernet and TCP/IP based protocols are replacing the older proprietary standards. Although certain characteristics of frame-based network communication technology (determinism, synchronization, protocol selection, environment suitability) have restricted the adoption of Ethernet in a few specialized applications, the vast majority of markets have accepted Ethernet networks for HMI/SCADA.
A few vendors have begun offering application specific SCADA systems hosted on remote platforms over the Internet. This removes the need to install and commission systems at the end-user's facility and takes advantage of security features already available in Internet technology, VPNs and SSL. Some concerns include security, Internet connection reliability, and latency.
SCADA systems are becoming increasingly ubiquitous. Thin clients, web portals, and web based products are gaining popularity with most major vendors. The increased convenience of end users viewing their processes remotely introduces security considerations. While these considerations are already considered solved in other sectors of Internet services, not all entities responsible for deploying SCADA systems have understood the changes in accessibility and threat scope implicit in connecting a system to the Internet.
Security issues
The move from proprietary technologies to more standardized and open solutions together with the increased number of connections between SCADA systems and office networks and the Internet has made them more vulnerable to attacks - see references. Consequently, the security of SCADA-based systems has come into question as they are increasingly seen as extremely vulnerable to cyberwarfare/cyberterrorism attacks.
In particular, security researchers are concerned about:
- the lack of concern about security and authentication in the design, deployment and operation of existing SCADA networks
- the belief that SCADA systems have the benefit of security through obscurity through the use of specialized protocols and proprietary interfaces
- the belief that SCADA networks are secure because they are physically secured
- the belief that SCADA networks are secure because they are disconnected from the Internet
SCADA systems are used to control and monitor physical processes, examples of which are transmission of electricity, transportation of gas and oil in pipelines, water distribution, traffic lights, and other systems used as the basis of modern society. The security of these SCADA systems is important because compromise or destruction of these systems would impact multiple areas of society far removed from the original compromise. For example, a blackout caused by a compromised electrical SCADA system would cause financial losses to all the customers that received electricity from that source. How security will affect legacy SCADA and new deployments remains to be seen.
There are two distinct threats to a modern SCADA system. First is the threat of unauthorized access to the control software, whether it be human access or changes induced intentionally or accidentally by virus infections and other software threats residing on the control host machine. Second is the threat of packet access to the network segments hosting SCADA devices. In many cases, there is rudimentary or no security on the actual packet control protocol, so anyone who can send packets to the SCADA device can control it. In many cases SCADA users assume that a VPN is sufficient protection and are unaware that physical access to SCADA-related network jacks and switches provides the ability to totally bypass all security on the control software and fully control those SCADA networks. These kinds of physical access attacks bypass firewall and VPN security and are best addressed by endpoint-to-endpoint authentication and authorization such as are commonly provided in the non-SCADA world by in-device SSL or other cryptographic techniques.
Many SCADA systems are deployed in critical infrastructures. Attacks to these systems can impact public health and safety. A famous example of a computer-based attack to a SCADA system is the attack carried out on Maroochy Shire Council's sewage control system in Queensland, Australia. Shortly after a contractor had installed the system in January 2000, it began to experience unexplainable problems. Pumps did not run when needed, alarms were not reported, and extensive flooding with sewage occurred in a nearby park and contamination of a river. After careful observation, it was determined that sewage valves were opening of their own accord. This was believed to be a system bug, until careful monitoring of the system logs revealed that these malfunctions were the result of a cyber attack. After 46 reported attacks, the culprit was identified as an disgruntled ex-employee of the contractor company that installed the system, and who was trying to be hired back to solve the problem.
Many vendors of SCADA and control products have begun to address these risks in a basic sense by developing lines of specialized industrial firewall and VPN solutions for TCP/IP-based SCADA networks as well as external SCADA monitoring and recording equipment. Additionally, application whitelisting solutions are being implemented because of their ability to prevent malware and unauthorized application changes without the performance impacts of traditional antivirus scans[citation needed]. Also, the ISA Security Compliance Institute (ISCI) is emerging to formalize SCADA security testing starting as soon as 2009. ISCI is conceptually similar to private testing and certification that has been performed by vendors since 2007. Eventually, standards being defined by ISA99 WG4 will supersede the initial industry consortia efforts, but probably not before 2011.
The increased interest in SCADA vulnerabilities has resulted in vulnerability researchers discovering vulnerabilities in commercial SCADA software and more general offensive SCADA techniques presented to the general security community. In electric and gas utility SCADA systems, the vulnerability of the large installed base of wired and wireless serial communications links is addressed in some cases by applying bump-in-the-wire devices that employ authentication and Advanced Encryption Standard encryption rather than replacing all existing nodes.
In June 2010, VirusBlokAda reported the first detection of malware that attacks SCADA systems (Siemens' WinCC/PCS7 systems) running on Windows operating systems. The malware is called Stuxnet and uses four zero-day attacks to install a rootkit which in turn logs in to the SCADA's database and steals design and control files. The malware is also capable of changing the control system and hiding those changes. The malware was found by an anti-virus security company on 14 systems with the majority in Iran.
Read more...


